robot end effector ppt
Though in the industrial robotics due to less complications two. A velocity with some finite value may correspond to an unbounded joint velocity ie.
Ppt Medical Robotics Powerpoint Presentation Free Download Id 21137
Definitions Slide covers more definitions.
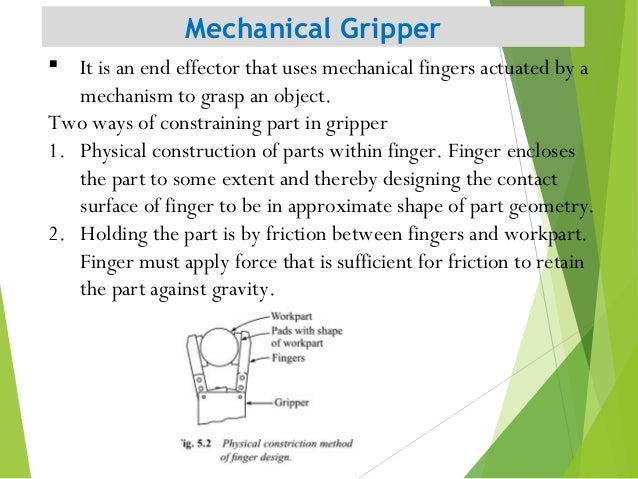
. The function of the gripper mechanism is to translate some form of power input into the grasping action of the finger against the part. Device that attaches to the wrist of the robot arm and enables the general- purpose robot to perform a specific task. Industrial robot cell.
Medical Robotics Winter 2019 Lecture 5. In the strict definition which originates from serial robotic manipulators the end effector means the last link of the robot. A robotic end effector is the device that is mounted onto the end of a robot arm.
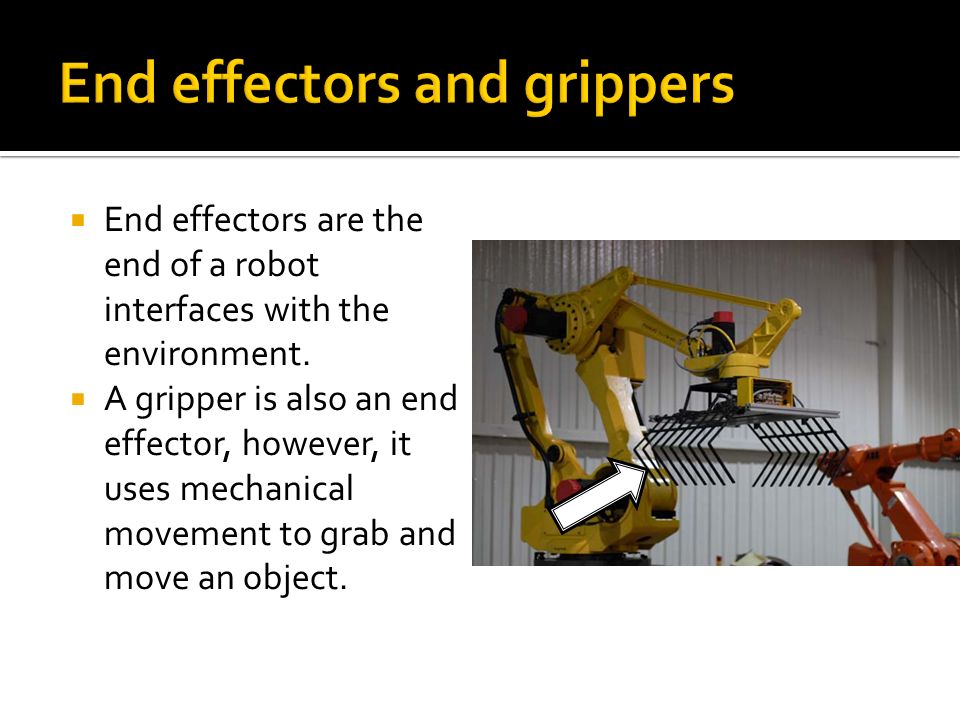
The end effector also known as end-of-arm tooling sits at the end of the robot arm and moves only when a human operator activates it through the associated software. End effector is a generic term that includes all the devices that can be intalled at a robot wrist. At this endpoint the tools are attached.
Even though a human hand is very versatile an end effector has one great advantage that humans do not have and that is the interchangeability of end effectors. The design depends on the particular robot being implemented objects to be grasped tasks to be performed and the robot work environment. End effector 5 Device that attaches to the wrist of the robot arm and enables the general-purpose robot to perform a specific task.
VUSE Other titles PowerPoint PPT presentation. Grippers to grasp and manipulate objects eg parts during work cycle Tools to perform a. It is attaches to the wrist of the robot arm enables robot to perform a specific task.
An end effector is the device that is at the end of a robotic arm. A mechanical gripper is an end effector that uses mechanical fingers actuate by a mechanism to grasp an object. Then it cannot do it directly it is non-holonomic Three wheels that both steer and drive Strategies.
Humanoid robot which are also not end effectorsthey are part of the robots mobility. Synonyms of end effector are end of arm tooling or EOAT robot peripherals or robot accessories although these last two terms are not as precise and can include devices that are not necessarily installed and the end of the robot arm. In a wider sense an end effector can be.
Statically stable control eg. This is forward dynamics. Given joint torques or end-effector forces what motions eg.
The end effectors must be custom engineered for the particular task which is to be performed. In robotics an end effector is the device at the end of a robotic arm designed to interact with the environment. ROBOTEND EFFECTOR INTERFACE Physical support during the work cycle 1.
End effector A robotic end-effector is any object attached to the robot flange wrist that serves a function. Ambler Keep 3 legs on ground at all times Strategies. Inside the body of a robot small motor is present known as actuators.
Both the hardware and software are the controllers of the robot. Of end effector is determined by dof. Introduction to Robotics A common view.
Robot End Effector - Robot End Effector Biological Sample Handling at -80 C Mike Patrie James Way Carley Holt Serg Arabasky Ming Chaio Chiang Biomech PowerPoint PPT presentation free to view. This chapter outlines many of the design and selection decisions of robotic end effectors. Robot moves in reaction to feedback from sensors with the help of actuators.
In the case of a serial manipulator the robot end effector usually lies in the hardwares last link. A Robot End effector is a mechanical part attached to the end of the robot arm hardware that is intended for direct interaction of environment and adjacent. There are two main types of end effectors.
Robot end-effectors are also. Robotic Needle End Arm Effector for Integration With CT Scan Description. The controller controls the movement of the manipulator and end effector.
PowerPoint PPT presentation free to view. An end effector is the device that is at the end of a robotic arm. 252004 70358 PM Document presentation format.
A bounded end effector velocity ie. One or more robot systems including associated machinery and equipment and the associated safeguarded space and protective measures. End effectors can be part of the robots integral design or added-on to the base robot.
There are two main types of end effectors. End effector is any object attached to the robot flange wrist that serves as a function. RF Based Pick And Place Robotic Arm - A pick and place robot with a end effector to grip and place objects in your desired locationcontrolled by RF communication.
In robotics an end effector is the device at the end of a robotic arm designed to interact with the environment. Agenda Introduction to Robotics Classification of Robots Robot accessories Robot coordinates Work volumes and Reference Frames Robot Programming Robot Applications in Lean Mfg. For fixed robot dof.
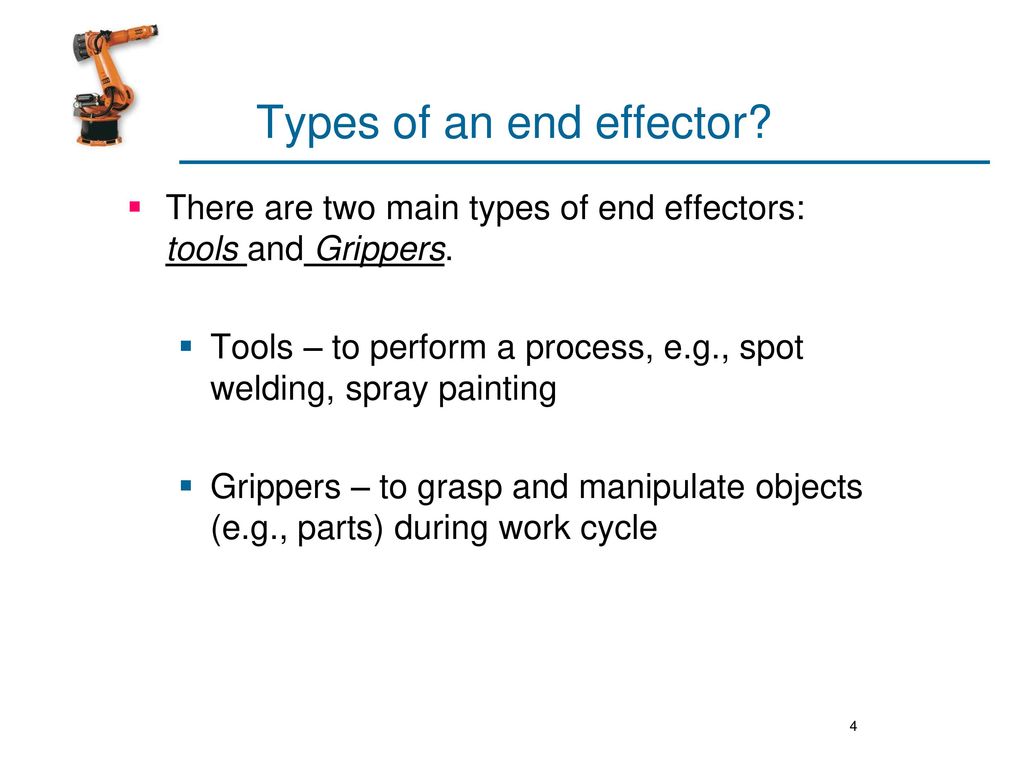
Grippers and tools We can think of an end effector like a human hand. The end effector is the part that reacts to stimuli and interacts with the environment. Robots as Humanoids We will be studying Industrial manipulator type Robots.
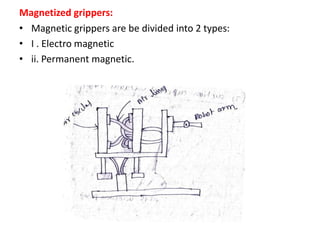
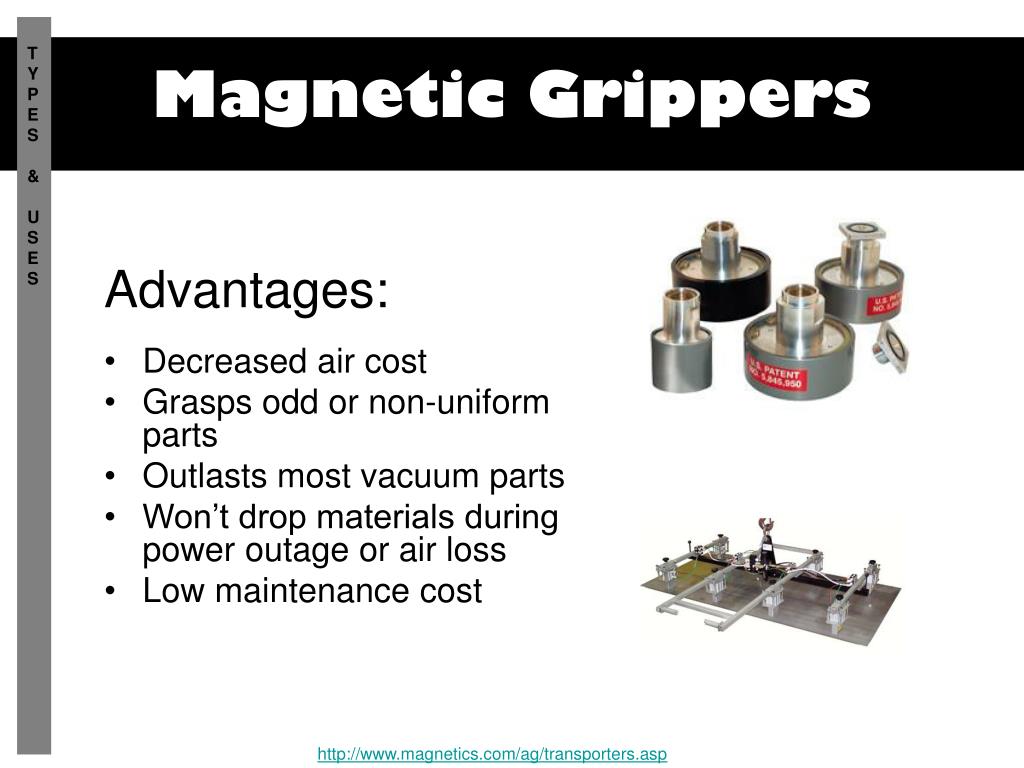
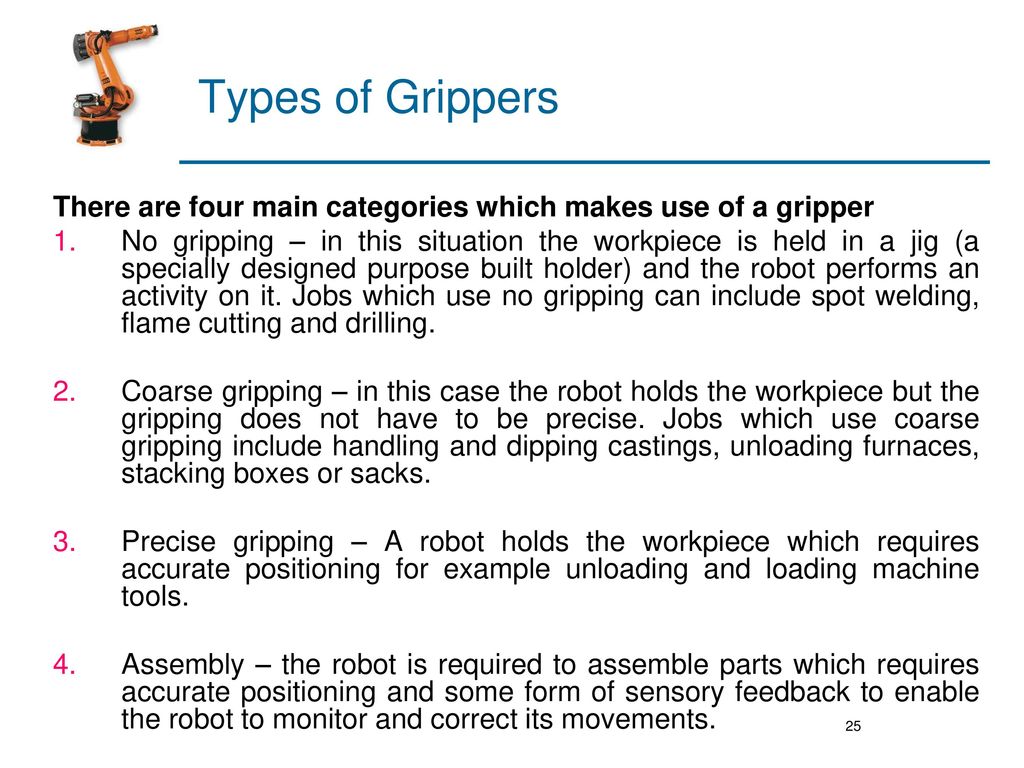
1Mechanical 2Vacuum 3Magnetized 4. One that approaches infinity if we want the end effector to attain a certain velocity we need to input an infinite joint velocity Not a great idea. Pick and place robot has many advantages and it uses in military medical and defense applications.
End-effectors Any machinery equipment devices external auxiliary axes or sensors supporting the robot performing its task. Or would result. Types of end effectors Grippers.
The exact nature of this device depends on the application of the robot. Any object attached to the robot flange wrist that serves a function. Robotics Timeline 1922 Czech author Karel Capek wrote a story.
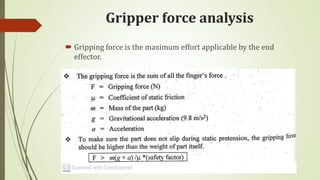
Strength Its ability to withstand the forces associated with the operation of the end effector. The purpose of this mechanical part is subject to the robots application in the world. End effectors may consist of a gripper or a tool.
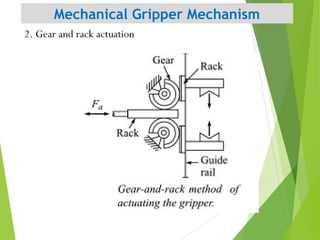
The gripper can be of two fingers three fingers or even five fingers. The controller is the brain of a robot. Robot dynamics and simulation Allison Okamura Stanford University.
Mechanism of gripping Generally the gripping mechanism is done by the grippers or mechanical fingers. End effector is gripper or end-arm tooling attached to the wrist of manipulator to accomplish the desired task. Compliance Its refers to the wrist sockets ability to yield elastically when.
Of robot max 6 Mobile robot on plane can reach position described by 3 dof but if robot has fewer dof. Strategies Used in Wafer Front End Process - The wafer front end semiconductors offer great compatibility for high-temperature applications.
Robotics End Effector
Robotics Unit 2 End Effector
Ppt Robotics History Powerpoint Presentation Free Download Id 5311098
Components Of Industrial Robotics Types Of Arms And End Effectors
Ppt Chapter 8 End Effectors Powerpoint Presentation Free Download Id 5390310

Robotics Unit Ii End Effectors Ppt Download
Ppt End Effectors Powerpoint Presentation Free Download Id 295232
Robotics Unit Ii End Effectors Ppt Download
End Of Arm Tooling For Industrial Robots Ppt Video Online Download
Robotics Unit Ii End Effectors Ppt Download

End Effectors
End Effectors Are The End Of A Robot Interfaces With The Environment A Gripper Is Also An End Effector However It Uses Mechanical Movement To Grab Ppt Download
Robotics End Effector
Robotics Unit Ii End Effectors Ppt Download
Robotics Unit Ii End Effectors Ppt Download
Ppt Robotics Powerpoint Presentation Free Download Id 3663370

Magnetic Robot End Effector Top 5 Pros And Cons

Ppt Format
Robotics End Effector